





A NASA mechanical engineer wants to build a levitating magnetic robot train on the moon—and his employer is interested in hearing more.
Earlier this month, the agency’s Innovative Advanced Concepts (NIAC) program supplied six “visionary” teams with an influx of funding to help assess the feasibility of their far-out ideas. But one project stands out from the cohort of fluidic telescopes, pulsed plasma rockets, and quantum-dot solar sails—not only for its underlying science fiction concept, but its comparatively straightforward conceit. Simply put, Ethan Schaler and collaborators want to build “the first lunar railway system” using their Flexible Levitation on a Track (FLOAT) design.
“Our goal is to demonstrate FLOAT’s fundamental usefulness as a novel transport system—similar to a railway or conveyor belt—that is well-suited for the Moon,” Schaler tells PopSci.
Any permanent lunar base will require live-sustaining payloads like water, liquid hydrogen, and construction materials. Some of these could conceivably arrive on resupply rockets, but it would be much cheaper and logistically simpler to harvest from the moon itself. Similarly, transporting cargo across large distances may be possible on lunar RVs, but an automated system could offer a safe and reliable alternative.
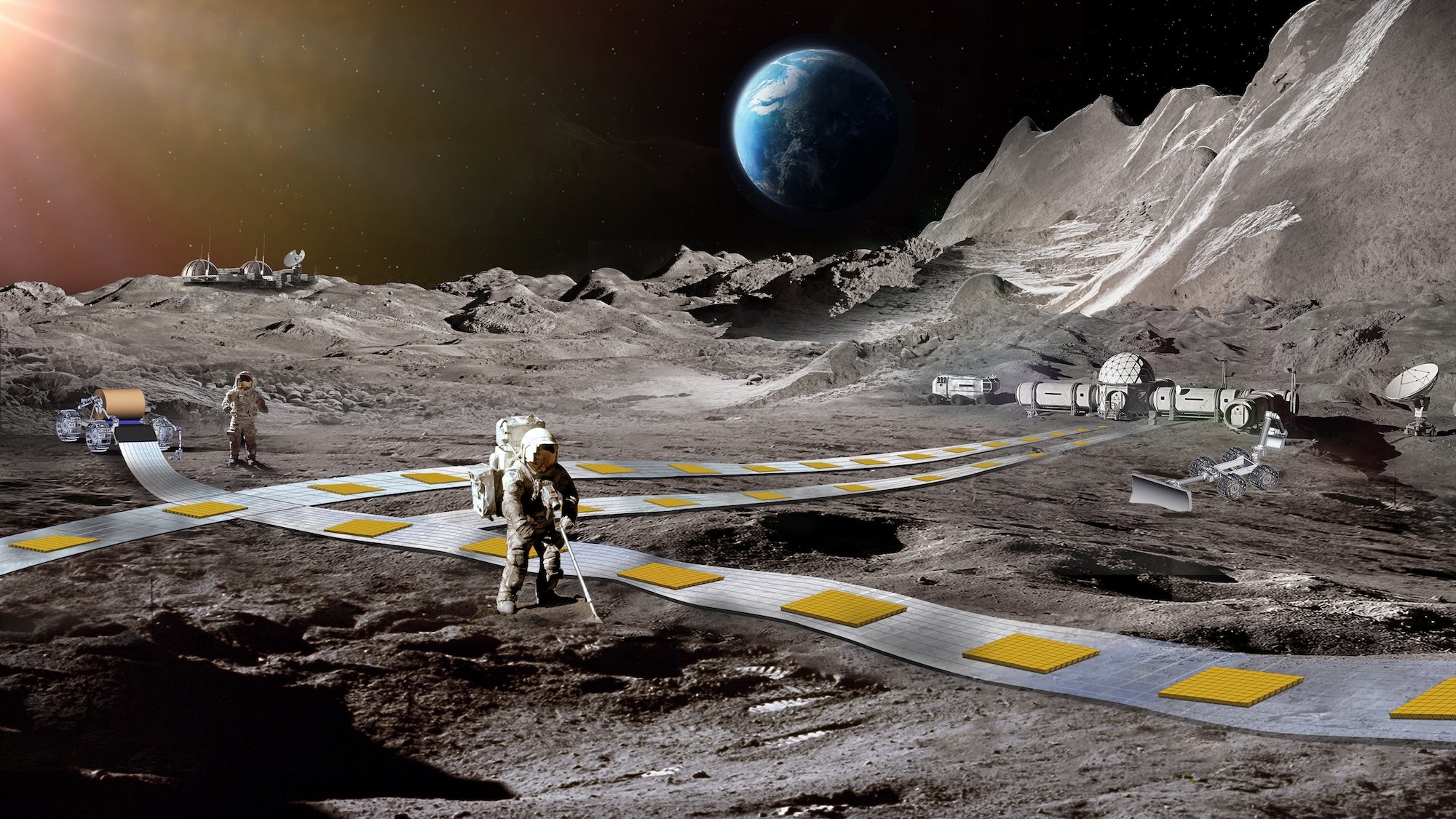
Schaler’s team believes their FLOAT proposal could be the answer. In its current concept, unpowered magnetic robots would hover atop a flexible film track composed of three separate layers: graphite to create the diamagnetic levitation, a flex-circuit layer capable of controlled electromagnetic thrust, as well as an optional solar panel coating to passively generate energy for the base.
“FLOAT robots have no moving parts and levitate over the track to minimize lunar dust abrasion / wear, unlike lunar robots with wheels, legs, or tracks,” FLOAT’s project description explains, adding that the tracks will ideally also “unroll directly onto the lunar regolith to avoid major on-site construction.”
[Related: NASA wants to measure moonquakes with laser-powered fiber optic cables.]
According to Schaler, NIAC’s funding will finance an upcoming Phase II conceptual study (Phase I was the initial FLOAT pitch). Over the next two years, researchers will study how potential lunar environmental hazards such as radiation and extreme temperatures may affect their rail system, then construct a small prototype platform containing miniature robots and tracks. Placing their system in various environmental chambers will allow them to experiment with thermal fluctuations and reduced-gravity scenarios. Further tests will involve simulating rough, dirty lunar terrain to better understand what site preparations will be needed to install a real FLOAT system, such as smoothing out regolith and clearing large rocks from pathways.
Meanwhile, another goal is to scale up their magnetic robot prototypes. Schaler’s group created 10-square-cm robots during Phase I that were reportedly “10x over state-of-the-art at that time.” By the end of Phase II, researchers hope to build 100-square-cm bots.
“It will still be 1/10th [the] length-scale of the final meter-scale robots, but again a big improvement over current state of the art,” Schaler says while noting they expect to encounter “new engineering challenges at each order-of-magnitude increase.”
As they work to physically scale up and test their project designs, engineers will also conduct full FLOAT system simulations using computer software to virtually test ideas across multiple locations around the lunar South Pole, where NASA intends to send its Artemis astronauts.
While FLOAT remains in its early concept study phases and is not cleared for actual NASA missions, Schaler looks forward to determining if such a wild idea could one day become a vital component of lunar life.
“I do hope to see the technology in FLOAT fly to the moon, space, or another planet in the future,” he says.

>>> Read full article>>>
Copyright for syndicated content belongs to the linked Source : Popular Science – https://www.popsci.com/science/nasa-moon-train/


{kind=link}